Modul 2
PWM, ADC, dan Interrupt
1. Pendahuluan [Kembali]
- Asistensi dilakukan 3 kali dengan lama pertemuan 20 menit (Rabu, Kamis, Jumat)
- Praktikum dilakukan 1x dengan lama pertemuan 90 menit (Selasa)
- Laporan akhir (format sesuai dengan isi blog) dikumpulkan pada hari Jumat
2. Tujuan [Kembali]
- Memahami prinsip kerja PWM pada mikrokontroler
- Memahami prinsip kerja ADC pada mikrokontroler
- Menggunakan PWM dan ADC pada Arduino
3. Alat dan Bahan [Kembali]
A. Alat
a) Instrument
1. Power Supply

B. Bahan
1. Potensiometer





4. Dasar Teori [Kembali]
A. Resistor
Perhitungan untuk Resistor dengan 4 Gelang warna :


B. Komponen Input
-Keypad


.png)


-LED (Light Emiting Diode)

-Liquid Crystal Display (LCD)




Kaki-kaki yang terdapat pada LCD
-Seven Segment

-Dot matriks
.png)


Block diagram dapat digunakan untuk memudahkan / memahami bagaimana kinerja dari mikrokontroler ATMega 328P.

A. Potensiometer Potensiometer
(POT) adalah salah satu jenis Resistor yang Nilai Resistansinya dapat
diatur sesuai dengan kebutuhan rangkaian elektronika ataupun kebutuhan
pemakainya. Sebuah
Potensiometer (POT) terdiri dari sebuah elemen resistif yang membentuk
jalur (track) dengan terminal di kedua ujungnya. Sedangkan terminal
lainnya (biasanya berada di tengah) adalah Penyapu (Wiper) yang
dipergunakan untuk menentukan pergerakan pada jalur elemen resistif
(Resistive). Pergerakan Penyapu (Wiper) pada Jalur Elemen Resistif
inilah yang mengatur naik-turunnya Nilai Resistansi sebuah
Potensiometer. Simbol dan bentuk Potensiometer dapat dilihat pada gambar 9 berikut. Gambar 9. Bentuk dan Simbol Potensiometer
Gambar 9. Bentuk dan Simbol Potensiometer
Jenis Potensiometer: 1. Potensiometer SliderPotensiometer
geser, atau pot geser, dirancang untuk mengubah nilai resistansi
kontaknya dengan gerakan linier dan dengan demikian terdapat hubungan
linier antara posisi kontak penggeser dan resistansi output. Gambar 10. Potensiometer Geser2. Potensiometer Rotary Potensiometer
putar (tipe yang paling umum) memvariasikan nilai resistifnya sebagai
hasil dari pergerakan sudut. Memutar kenop atau dial yang terpasang pada
poros menyebabkan penyeka internal menyapu sekitar elemen resistif
melengkung. Penggunaan potensiometer putar yang paling umum adalah pot
kontrol volume.
Gambar 10. Potensiometer Geser2. Potensiometer Rotary Potensiometer
putar (tipe yang paling umum) memvariasikan nilai resistifnya sebagai
hasil dari pergerakan sudut. Memutar kenop atau dial yang terpasang pada
poros menyebabkan penyeka internal menyapu sekitar elemen resistif
melengkung. Penggunaan potensiometer putar yang paling umum adalah pot
kontrol volume.
 Gambar 11. Potensiometer Rotary
Gambar 11. Potensiometer Rotary
3. Potensiometer TrimmerPotensiometer
preset atau trimmer adalah potensiometer tipe "set-and-forget" kecil
yang memungkinkan penyesuaian yang sangat halus atau sesekali mudah
dilakukan ke rangkaian, (misalnya untuk kalibrasi). Potensiometer preset
putar satu putaran adalah versi mini dari variabel resistor standar
yang dirancang untuk dipasang langsung pada papan rangkaian tercetak dan
disesuaikan dengan menggunakan obeng berbilah kecil atau alat plastik
serupa.
 Gambar 12. Potensiometer Trimmer atau Preset
Gambar 12. Potensiometer Trimmer atau Preset
B. Komponen Input a) LM 35
Sensor
suhu IC LM 35 merupkan chip IC produksi Natioanal Semiconductor yang
berfungsi untuk mengetahui temperature suatu objek atau ruangan dalam
bentuk besaran elektrik, atau dapat juga di definisikan sebagai komponen
elektronika yang berfungsi untuk mengubah perubahan temperature yang
diterima dalam perubahan besaran elektrik. Sensor suhu IC LM35 dapat
mengubah perubahan temperature menjadi perubahan tegangan pada bagian
outputnya. Sensor suhu IC LM35 membutuhkan sumber tegangan DC +5 volt
dan konsumsi arus DC sebesar 60 µA dalam beroperasi. Bentuk fisik sensor
suhu LM 35 merupakan chip IC dengan kemasan yang berfariasi, pada
umumnya kemasan sensor suhu LM35 adalah kemasan TO-92 seperti terlihat pada gambar dibawah. 
Gambar 13. LM 35
Dari
gambar diatas dapat diketahui bahwa sensor suhu IC LM35 pada dasarnya
memiliki 3 pin yang berfungsi sebagai sumber supply tegangan DC +5 volt,
sebagai pin output hasil penginderaan dalam bentuk perubahan tegangan
DC pada Vout dan pin untuk Ground. Karakteristik Sensor suhu IC LM35 adalah : - Memiliki
sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu
10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
- Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC.
- Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
- Bekerja pada tegangan 4 sampai 30 volt.
- Memiliki arus rendah yaitu kurang dari 60 µA.
- Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
- Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
- Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
- Tegangan output sensor suhu IC LM35 dapat diformulasikan sebagai berikut :
Vout LM35 = Temperature º x 10 mV
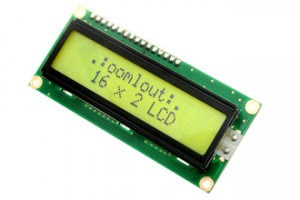
C. Komponen Output a) LCDLiquid
Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi
untukmenampilkan output sebuah sistem dengan cara membentuk suatu citra
atau gambaran pada sebuah layar. Secara garis besar komponen penyusun
LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah
elektroda transparan dan 2 buah filter polarisasi (polarizing filter).
Struktur LCD dapat dilihat pada gambar berikut. Gambar 14. Struktur LCD
Gambar 14. Struktur LCD
Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah
citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari
pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual
di pasaran sudah memiliki integrated circuit tersendiri sehingga para
pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan
mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah
tersedia.Module circuit dari LCD dan kaki-kakinya dapat dilihat melalui gambar berikut.
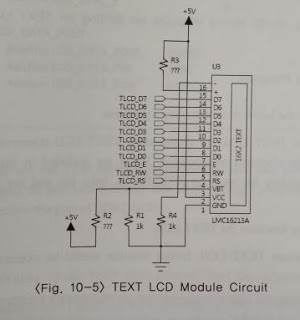 Gambar 15. TEXT LCD Module Circuit
Gambar 15. TEXT LCD Module Circuit
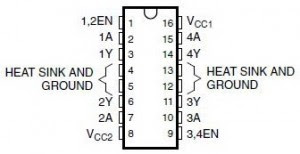
 Gambar 16. Kaki-kaki yang Terdapat pada LCDb) Motor DCMotor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct- unidirectional. Motor DC adalah piranti elektronik yang mengubah energi listrik menjadi energi mekanik berupa gerak rotasi. Pada motor DC terdapat jangkar dengan satu atau lebih kumparan terpisah. Tiap kumparan berujung pada cincin belah (komutator). Dengan adanya insulator antara komutator, cincin belah dapat berperan sebagai saklar kutub ganda (double pole, double throw switch). Motor DC bekerja berdasarkan prinsip gaya Lorentz, yang menyatakan ketika sebuah konduktor beraliran arus diletakkan dalam medan magnet, maka sebuah gaya (yang dikenal dengan gaya Lorentz) akan tercipta secara ortogonal diantara arah medan magnet dan arah aliran arus. Kecepatan putar motor DC (N) dirumuskan dengan Persamaan berikut.
Gambar 16. Kaki-kaki yang Terdapat pada LCDb) Motor DCMotor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct- unidirectional. Motor DC adalah piranti elektronik yang mengubah energi listrik menjadi energi mekanik berupa gerak rotasi. Pada motor DC terdapat jangkar dengan satu atau lebih kumparan terpisah. Tiap kumparan berujung pada cincin belah (komutator). Dengan adanya insulator antara komutator, cincin belah dapat berperan sebagai saklar kutub ganda (double pole, double throw switch). Motor DC bekerja berdasarkan prinsip gaya Lorentz, yang menyatakan ketika sebuah konduktor beraliran arus diletakkan dalam medan magnet, maka sebuah gaya (yang dikenal dengan gaya Lorentz) akan tercipta secara ortogonal diantara arah medan magnet dan arah aliran arus. Kecepatan putar motor DC (N) dirumuskan dengan Persamaan berikut.
 Gambar 17. Rumus Kecepatan Putar Motor DC
Gambar 17. Rumus Kecepatan Putar Motor DC
Simbol Motor DC

Gambar 18. Simbol Motor DC
Motor DC tersusun dari dua bagian yaitu bagian diam (stator) dan bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar lilitanya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan.
Prinsip Kerja Motor DC

Gambar 19. Prinsip Kerja Motor DC
Kumparan ABCD terletak dalam medan magnet serba sama dengan kedudukan sisi aktif AD dan CB yang terletak tepat lurus arah fluks magnet. Sedangkan sisi AB dan DC ditahan pada bagian tengahnya, sehingga apabila sisi AD dan CB berputar karena adanya gaya lorentz, maka kumparan ABCD akan berputar. Hasil perkalian gaya dengan jarak pada suatu titik tertentu disebut momen, sisi aktif AD dan CB akan berputar pada porosnya karena pengaruh momen putar (T). Setiap sisi kumparan aktif AD dan CB pada gambar diatas akan mengalami momen putar sebesar :
T = F.r
Dimana :
T = momen putar (Nm) F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
Pada daerah dibawah kutub-kutub magnet besarnya momen putar tetap karena besarnya gaya lorentz. Hal ini berarti bahwa kedudukan garis netral sisi sisi kumparan akan berhenti berputar. Supaya motor dapat berputar terus dengan baik, maka perlu ditambah jumlah kumparan yang digunakan. Kumparan- kumparan harus diletakkan sedemikian rupa sehingga momen putar yang dialami setiap sisi kumparan akan saling membantu dan menghasilkan putaran yang baik. Dengan pertimbangan teknis, maka kumparan-kumparan yang berputar tersebut dililitkan pada suatu alat yang disebut jangkar, sehingga lilitan kumparan itupun disebut lilitan jangkar. Struktur Motor DC dapat dilihat pada gambar berikut ini. Gambar 20. Struktur Motor DC C. Komponen Lainnya a) Arduino Uno Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya
terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis
AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini
adalah Arduino Uno
yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan
komunikasi serial agar Arduino dapat berhubungan dengan komputer
ataupun perangkat lain. Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :
Gambar 20. Struktur Motor DC C. Komponen Lainnya a) Arduino Uno Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya
terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis
AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini
adalah Arduino Uno
yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan
komunikasi serial agar Arduino dapat berhubungan dengan komputer
ataupun perangkat lain. Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :

Arduino Uno
Bagian-bagian arduino uno:


Dari gambar diatas dapat diketahui bahwa sensor suhu IC LM35 pada dasarnya memiliki 3 pin yang berfungsi sebagai sumber supply tegangan DC +5 volt, sebagai pin output hasil penginderaan dalam bentuk perubahan tegangan DC pada Vout dan pin untuk Ground.
- Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
- Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC.
- Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
- Bekerja pada tegangan 4 sampai 30 volt.
- Memiliki arus rendah yaitu kurang dari 60 µA.
- Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
- Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
- Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
- Tegangan output sensor suhu IC LM35 dapat diformulasikan sebagai berikut :
Vout LM35 = Temperature º x 10 mV

Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.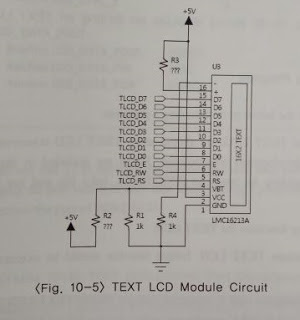


Simbol Motor DC

Gambar 18. Simbol Motor DC
Motor DC tersusun dari dua bagian yaitu bagian diam (stator) dan bagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet (sikat-sikat), sedangkan yang termasuk rotor adalah jangkar lilitanya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan.

Gambar 19. Prinsip Kerja Motor DC
Kumparan ABCD terletak dalam medan magnet serba sama dengan kedudukan sisi aktif AD dan CB yang terletak tepat lurus arah fluks magnet. Sedangkan sisi AB dan DC ditahan pada bagian tengahnya, sehingga apabila sisi AD dan CB berputar karena adanya gaya lorentz, maka kumparan ABCD akan berputar.
T = F.r
Dimana :
T = momen putar (Nm) F = gaya tolak (newton)
r = jarak sisi kumparan pada sumbu putar (meter)
Pada daerah dibawah kutub-kutub magnet besarnya momen putar tetap karena besarnya gaya lorentz. Hal ini berarti bahwa kedudukan garis netral sisi sisi kumparan akan berhenti berputar. Supaya motor dapat berputar terus dengan baik, maka perlu ditambah jumlah kumparan yang digunakan. Kumparan- kumparan harus diletakkan sedemikian rupa sehingga momen putar yang dialami setiap sisi kumparan akan saling membantu dan menghasilkan putaran yang baik. Dengan pertimbangan teknis, maka kumparan-kumparan yang berputar tersebut dililitkan pada suatu alat yang disebut jangkar, sehingga lilitan kumparan itupun disebut lilitan jangkar. Struktur Motor DC dapat dilihat pada gambar berikut ini.

Arduino Uno
Bagian-bagian arduino uno:
-Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
-Power jack
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
-Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
-Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
-Digital Pins I / O
Papan
Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai
logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM (
Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
Digunakan untuk mengulang program Arduino dari awal atau Reset.
-Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
-Analog Pins
Papan
Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca
sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan
mengubahnya menjadi nilai digital.
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
-LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Bagian - bagian pendukung:
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Bagian - bagian pendukung:
-RAM
RAM
(Random Access Memory) adalah tempat penyimpanan sementara pada
komputer yang isinya dapat diakses dalam waktu yang tetap, tidak
memperdulikan letak data tersebut dalam memori atau acak. Secara umum
ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM
(Dynamic Random Acces Memory).
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
-ROM
ROM (Read-only Memory)
adalah perangkat keras pada computer yang dapat menyimpan data secara
permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri
dari Mask ROM, PROM, EPROM, EEPROM.
Block Diagram Mikrokontroler ATMega 328P pada Arduino UNO
Adapun block diagram mikrokontroler ATMega 328P dapat dilihat pada gambar berikut:

Block diagram dapat digunakan untuk memudahkan / memahami bagaimana kinerja dari mikrokontroler ATMega 328P.
Pin-pin ATMega 328P:
 Rangkaian Mikrokontroler ATMega 328P pada Arduino UNO
Rangkaian Mikrokontroler ATMega 328P pada Arduino UNO
 b) Driver Motor L293D IC
L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat
dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang
dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke
sumber tegangan positif karena di dalam driver L293D sistem driver yang
digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4
buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan
mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk
membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver
motor DC IC l293D adalah sebagai berikut.
b) Driver Motor L293D IC
L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat
dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang
dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke
sumber tegangan positif karena di dalam driver L293D sistem driver yang
digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4
buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan
mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk
membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver
motor DC IC l293D adalah sebagai berikut.Konstruksi Pin Driver Motor DC IC L293D

Fungsi Pin Driver Motor DC IC L293D
· 1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
2. Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC 3. Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC 4. Pin
VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC,
dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver
dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang
dikendalikan. 5. Pin
GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini
ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin
kecil.Feature
Driver Motor DC IC L293D Driver motor DC IC L293D memiliki feature yang
lengkap untuk sebuah driver motor DC sehingga dapat diaplikasikan dalam
beberapa teknik driver motor DC dan dapat digunakan untuk mengendalikan
beberapa jenis motor DC. Feature yang dimiliki driver motor DC IC L293D
sesuai dengan datasheet adalah sebagai berikut :
· - Wide Supply-Voltage Range: 4.5 V to 36 V
· - Separate Input-Logic Supply
· - Internal ESD Protection
· - Thermal Shutdown
· - High-Noise-Immunity Inputs
- Functionally Similar to SGS L293 and SGS L293D
· - Output Current 1 A Per Channel (600 mA for L293D)
· - Peak Output Current 2 A Per Channel (1.2 A for L293D)
· - Output Clamp Diodes for Inductive Transient Suppression (L293D)
Rangkaian Aplikasi Driver Motor DC IC L293D

Pada
gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit
driver motor DC yang dihubungkan secar berbeda sesuai dengan keinginan
dan kebutuhan.
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
Block Diagram Mikrokontroler ATMega 328P pada Arduino UNO
Adapun block diagram mikrokontroler ATMega 328P dapat dilihat pada gambar berikut:



Konstruksi Pin Driver Motor DC IC L293D
Fungsi Pin Driver Motor DC IC L293D
· 1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
Feature Driver Motor DC IC L293D Driver motor DC IC L293D memiliki feature yang lengkap untuk sebuah driver motor DC sehingga dapat diaplikasikan dalam beberapa teknik driver motor DC dan dapat digunakan untuk mengendalikan beberapa jenis motor DC. Feature yang dimiliki driver motor DC IC L293D sesuai dengan datasheet adalah sebagai berikut :
· - Wide Supply-Voltage Range: 4.5 V to 36 V
· - Separate Input-Logic Supply
· - Internal ESD Protection
· - Thermal Shutdown
· - High-Noise-Immunity Inputs
- Functionally Similar to SGS L293 and SGS L293D
· - Output Current 1 A Per Channel (600 mA for L293D)
· - Peak Output Current 2 A Per Channel (1.2 A for L293D)
· - Output Clamp Diodes for Inductive Transient Suppression (L293D)
Rangkaian Aplikasi Driver Motor DC IC L293D

Pada gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit driver motor DC yang dihubungkan secar berbeda sesuai dengan keinginan dan kebutuhan.
c) Pulse Width Modulation
PWM (Pulse Width Modulation)
adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty
cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus
pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi
low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang
belum termodulasi.
Pada
board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang
diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin
tersebut merupakan pin yang bisa difungsikan untuk input analog atau
output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini,
bisa dilakukan dengan perintah analogWrite();
PWM
pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan
dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0
hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut
tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt).
Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan
bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127
(kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka
setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan
bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 * 255
atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan
bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.
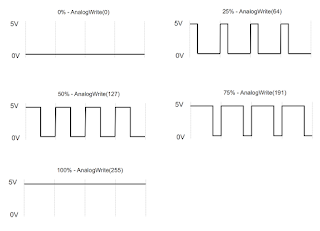 Siklus Sinyal PWM pada Arduino
Siklus Sinyal PWM pada Arduino





Tidak ada komentar:
Posting Komentar